<-- back to all linear algebra notes
Notes on Linear Algebra Done Right
note: incomplete and may never be finished. also the formatting is bad because i just ripped this off of my notion
Chapter 1—Vector Spaces
1A
- Definition of complex numbers, sets, tuples
- stands for or (fields)
- defined as set of all lists of length
1B Definition of Vector Spaces
- Vector space is a set with addition and scalar multiplication defined s/t:
- addition commutes + associative
- additive & multiplicative id.
- additive inverse
- distributive property
- If a set, the set of functions from to & is a vector space
- Additive id. and inv. in v.s. are unique
- denotes a vector space over
1C Subspaces
-
a subspace of is a vector space with the same additive id. and operations as on .
- In other words, iff satisfies , closure under addition, and closure under scalar mult
-
Sum of subspaces: for subspaces of ,
and is the smallest subspace of containing .
-
For subspaces of ,
a direct sum if each element can be written in only one way as a sum where each , then denoted as
Direct sum iff the only way to write 0 as a sum is by taking each
-
Suppose subspaces of . Then a direct sum .
Chapter 2—Finite Dimensional Vector Spaces
2A Span and Linear Independence
- Defines linear combination, span
- Span of a list of vectors in is the smallest subspace of containing all vectors in the list.
- Vector space is finite dimensional if some list of vectors in it spans the space
- Defines polynomials over , , and polynomials of degree at most over , .
- A vector space is infinite dimensional if it is not finite dimensional.
- A list of vectors in is linearly indepedent if the only choice of s/t is
- Suppose linearly dependent in . Then there exists s.t. .
- If the k-th term removed from , then the span of the remaining list equals the span of the original list
- Every subspace of a finite dimensional vector space is finite dimensional
2B Bases
- Defines basis
- A list of vectors in is a basis of iff every can be written uniquely in the form , where .
- Every spanning list contains a basis
- Every finite dimensional vector space has a basis
- Every linearly independent list of vectors in a finite dimensional vector space can be extended to a basis of the vector space
- Every subspace of is part of a direct sum equal to .
- e.g., sps. finite dimensional and a subspace of . Then there exists a subspace of s.t. .
2C Dimension
- Any two bases of a finite dimensional vector space have the same length
- Dimension of a finite-dimensional vector space is the length of any basis of the vector space, denoted
- Dimension of a subspace of a finite dimensional vector space is less than that of the original vector space
- finite dim. v.s. Then every linearly ind. list of vectors in of length is a basis of .
- finite dim v.s. and a subspace of s.t. their dimensions are equal. Then .
- Every spanning list of vectors of of length is a basis of
- If are subspaces of a finite dim v.s., then .
Chapter 3—Linear Maps
3A Vector Space of Linear Maps
- Definition of a linear map:
- a linear map from to is a function with the following properties:
- additivity: for all
- homogeneity: for all and all
- a linear map from to is a function with the following properties:
- Set of linear maps from to denotes
- from to is
- Suppose a basis of and . Then there exists a unique linear map such that for each .
- Linear maps are closed under addition and scalar multiplication (i.e., summing two linear maps is still a linear map) defined as
- is a vector space with the operations defined above
3B Null Spaces and Ranges
- For the null space of is the subset of whose vectors map to 0 under :
- Null space is a subspace (above, null T is a subspace of V)
- A function is injective if
- . Then injective iff .
- For the range of is the subset of that are equal to for some :
- The range is a subspace (above, range T is a subspace of W)
- A function is surjective if its range equals
- Fundamental theorem of linear maps
- sps. finite dimensional and . Then is finite dimensional and .
- Sps. finite dim. v.s. s.t. dim V > dim W. Then no linear map from to is injective.
- A homogeneous system of linear equations with more variables than equations has nonzero solutions
- A system of linear equations with more equations than variables has no solution for some choice of the constant terms
3C Matrices
- Definition of a matrix
- Definition of matrix of a linear map:
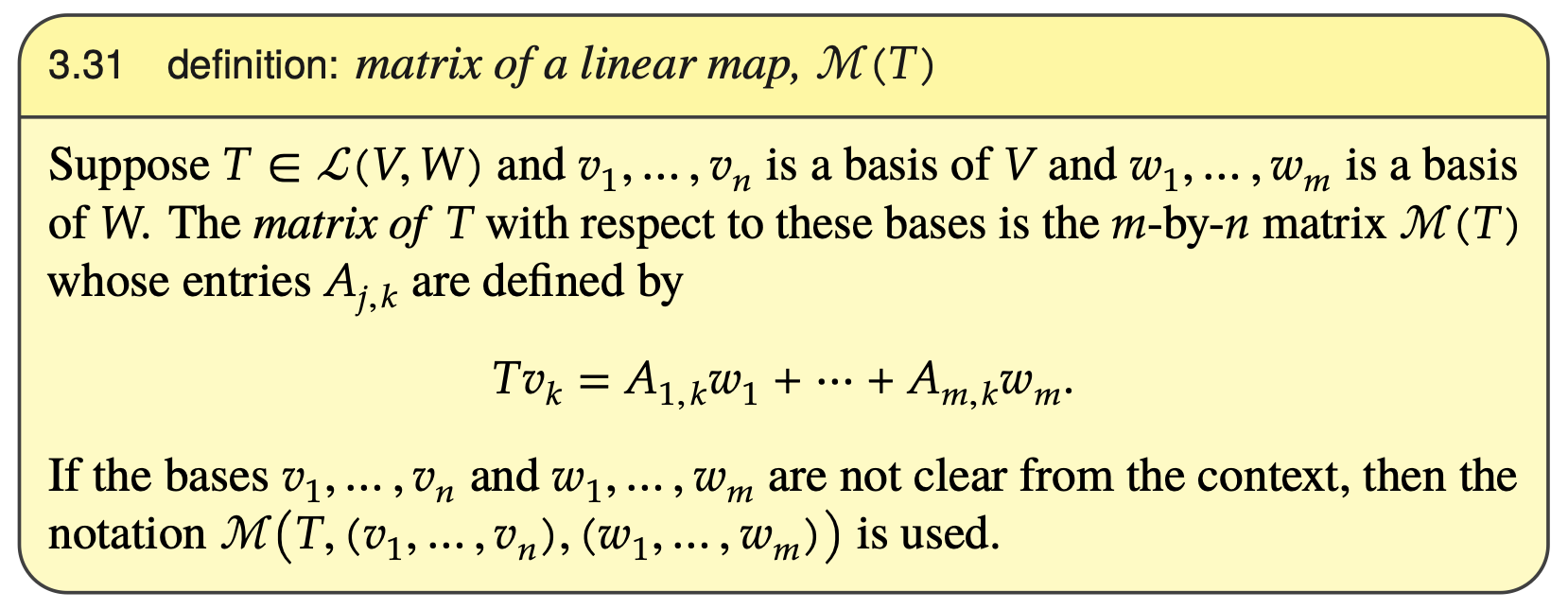
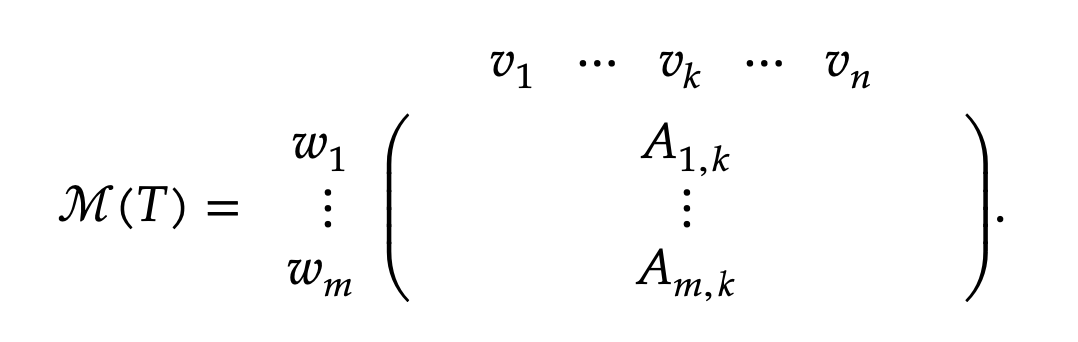
-
If is a linear map from to , assuming standard bases, we can think of elements of as columns of numbers and the k-th column of as applied to the k-th standard basis vector
-
For the rest of the section: assume finite-dim. and with a chosen basis
- Defines matrix addition
- In particular, matrix as the sum of linear maps:
- . Then .
- In particular, matrix as the sum of linear maps:
- Defines scalar multiplication of matrix
- Similarly as scalar times linear map:
- and . Then .
- Similarly as scalar times linear map:
- Notation: for positive integers, the set of all matrices with entries in denoted as
- With addition and scalar multiplication defined as above, a vector space of dimension .
- Defines matrix addition
-
Defines matrix multiplication
- Motivation: matrix as product of linear maps
- If and , then
- (Can use this motivation for understanding when matrices commute, when function composition retains certain properties)
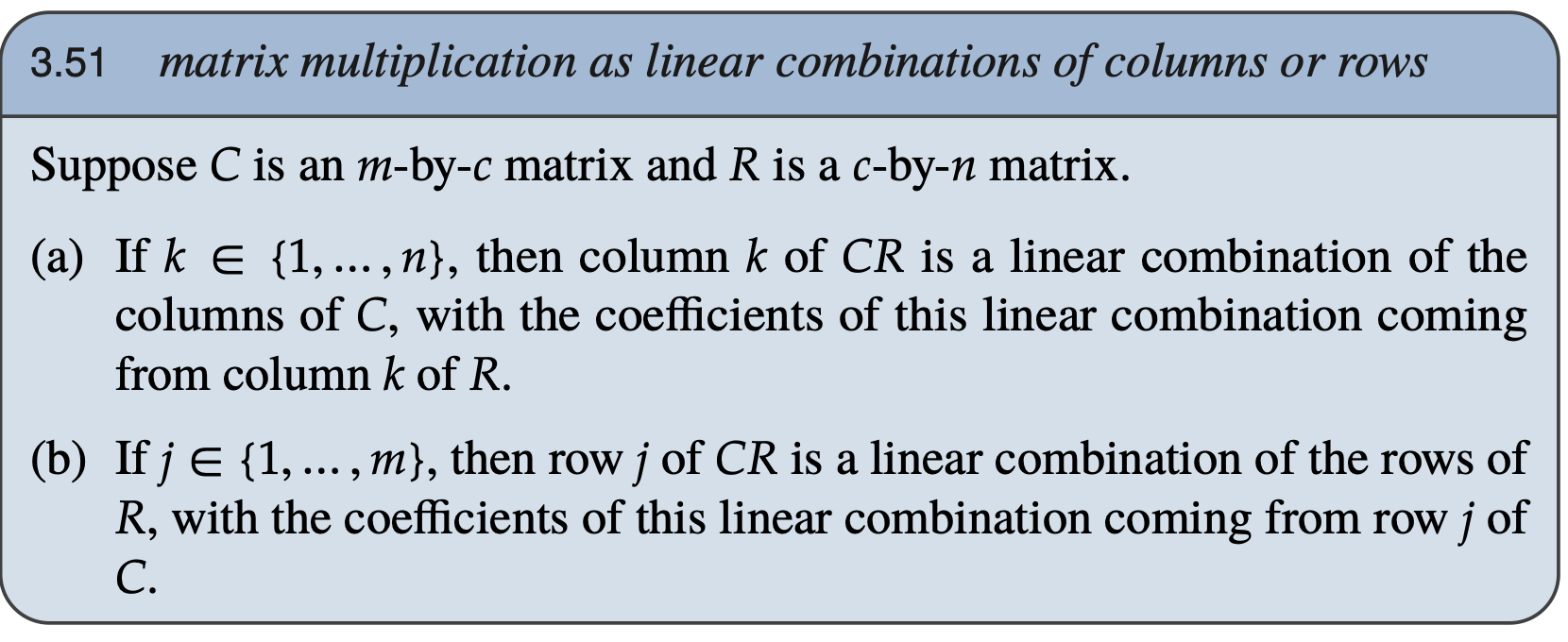
- Ways to think about matrix product entries:
- entry in row , column of is row of times column of
- column of equals times column of
- if is and is with entries ,
-
-
i.e., a linear combination of the columns from and the entries in
-
- Motivation: matrix as product of linear maps
-
Column-row factorization & rank of matrices
- Definition of column and row rank:
- a matrix with entries in
- Column rank is dimension of the span of the columns of in (e.g., at most )
- Row rank is dimension of span of the rows of in (e.g., at most )
- a matrix with entries in
- Definition of matrix transpose
- Column-row factorization:
- Suppose is matrix with entries in and column rank Then there exists an matrix and a matrix , both with entries in , such that .
- Pf. Each column of a matrix. The list of columns of can be reduced to a basis of the span of the columns, a list with length . These columns in the basis can be put together to form . Column of is a linear combination of the columns of . Make the coefficients of this linear combination into column of a matrix, which we call . Then .
- Column rank = row rank = rank of a matrix
- Suppose is matrix with entries in and column rank Then there exists an matrix and a matrix , both with entries in , such that .
- Definition of column and row rank:
3D Invertibility and Isomorphisms
- Defines invertible, inverse:
- A linear map is invertible if there exists a linear map such that equals the identity operator on and equals the identity operator on .
- A linear map satisfying and is called an inverse of
- An invertible linear map has a unique inverse
- Invertibility injectivity and surjectivity
- Sps. are finite-dim v.s. with dim = dim and .
- Then invertible injective surjective.
- Sps also that . Then .
- An isomorphism is an invertible linear map.
- Two finite-dim vector spaces are called isomorphic if there is an isomorphism from one vector space onto the other one
- dim = (dim )(dim )
- Linear maps thought of as matrix multiplication
- Matrix of a vector:
- sps. and a basis of . Then the matrix of w.r.t. this basis is the matrix , where are scalars s.t.
- (if we have a linear map from to , each v.s. with chosen basis, thten the k-th column of equals
- e.g. each column of linear map represented as a matrix is the linear map’s action on the corresponding basis vector in the domain, represented as a matrix
- Hence linear maps act like matrix multiplication:
- Suppose and . Suppose basis for and a basis for . Then .
- Pf. Sps. , with coefficients in . Then (by linearity). Hence (from the above). This equals , as desired.
- Suppose and . Suppose basis for and a basis for . Then .
- Sps. are finite-dim and . Then dim range equals the column rank of .
- Pf. Sps. a basis of and a basis of . The linear map that takes to is an isomorphism from onto the space . The restriction of this isomorphism to range is an isomorphism from range onto span$(\mathcal{M}(Tv_1), …, \mathcal{M}(Tv_n))$. The matrix equals column of .
- Matrix of a vector:
- Change of basis
- Defines identity matrix
- Defines invertible matrices (matrix inverse not introduced with det / computational method)
- Suppose and . If a basis of and a basis of and a basis of , then .
- Essentially same result of linear map and matrix mult., with explicit bases
- Suppose and are bases of . Then the matrices and are inverses of each other
- Change of basis formula:
- Shorthand notation:
- Sps. . Sps and are bases of . Let and and . Then .
- Suppose a basis of and invertible. Then , where both matrices are w.r.t. basis .
3E Products and Quotients of Vector Spaces
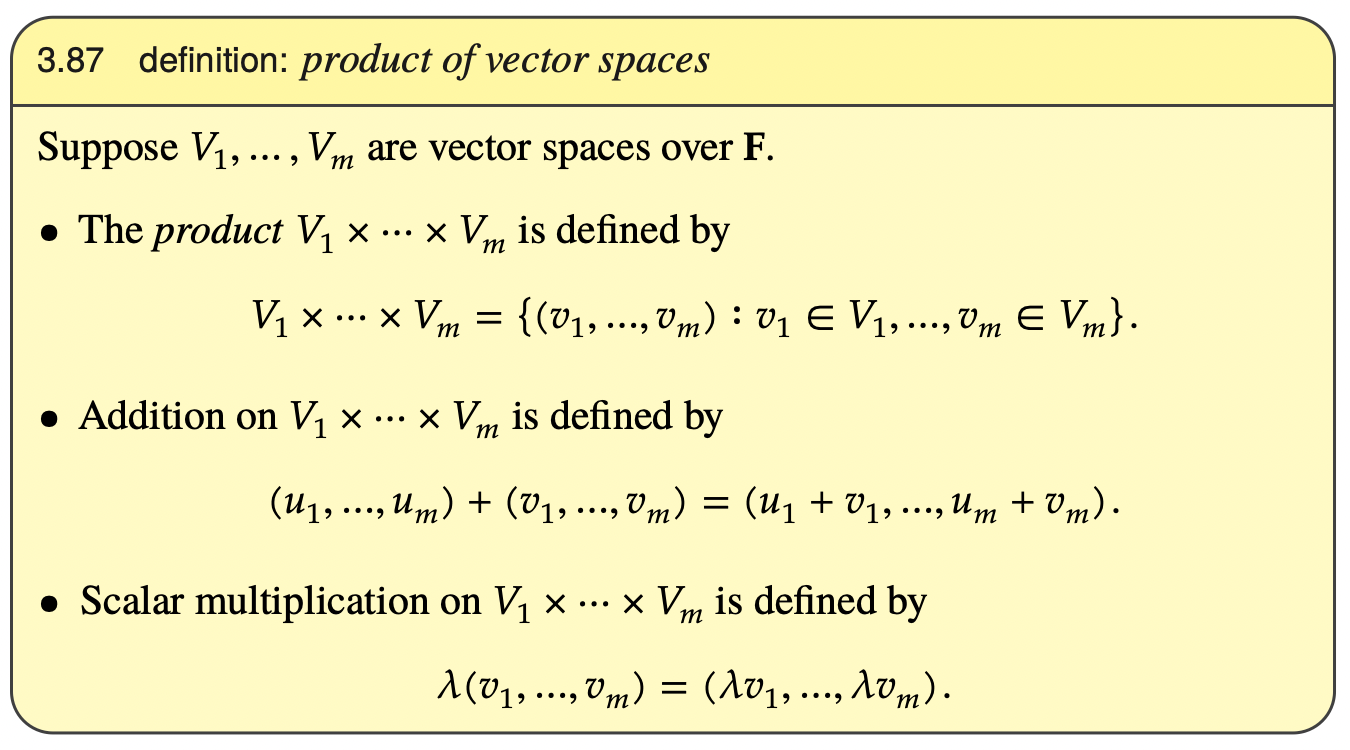
- Product of vector spaces is a vector space
- Dimension of a product is the sum of dimensions
- Definition of a translate:
- Defines a quotient space:
- Sps. a subspace of . Then the quotient space is the set of all translates of . Thus,
- Want this quotient space to be a vector space.
- Sps. a subspace of and . Then
- e.g., two translates of a subspace are equal or disjoint
- Defining addition and scalar multiplication on :
- Sps. a subspace of . Then addition and scalar multiplication defined as:
- Sps. a subspace of . Then addition and scalar multiplication defined as:
- With the operations above is a vector space.
- Sps. a subspace of and . Then
- Defines quotient map:
- a subspace of . The quotient map is the linear map defined by for each .
- dim = dim - dim
- Sps. . Define by .
- , where the quotient map of onto
- is injective
- range = range
- isomorphic to
- Hence we can think of as a modified version of , with a domain that produces a 1-1 map.
3F Duality
-
A linear functional on is a linear map from to (an element of
-
The dual space of , denoted , is the vector space of all linear functionals on , i.e.,
-
Sps. is finite dimensional. Then is also finite-dimensional and dim = dim .
- Pf. dim = dim = dim dim = dim .
-
If a basis of , then the dual basis of is the list of elements of , where each is the linear functional on such that
-
The dual basis of a basis of consists of the linear functionals on that give the coefficients for expressing a vector in as a linear combination of the basis vector:
- Sps. a basis of and is the dual basis. Then for each .
-
For finite dimensional, the dual basis is a basis of the dual space.
-
Sps. . The dual map of is the linear map defined for each by .
CH. 3 NOT DONEEEE
Chapter 5—Eigenvalues and Eigenvectors
Standing notation: is the reals or the complex numbers, is a vector space over
Eigenvalues
-
A linear map from a vector space to itself is called an operator
-
. A subspace of is called invariant under if for every
-
Motivation: to understand the behavior of a linear operator, we only need to understand the behavior of the linear operator restricted to subspaces which partition the entire . However, to apply many useful tools, we want the restriction of T to a subset (say, ) to map back into , hence we would like to study invariant subspaces
-
Thus is invariant under if is an operator on
-
-
The simplest possible nontrivial invariant subspaces (other than and ) are invariant subspaces of dimension 1.
- Take any with a nd let . is a 1 dimensional subspace of (and every 1-dimensional subspace of is of this form for some appropriate ).
- If is invariant under an operator , then , and so there exists a scalar such that .
- Conversely, if for some , then is a 1-dimensional subspace of invariant under .
-
. A number is an eigenvalue of if there exists such that and .
- For an eigenvalue , the corresponding vector s.t. is an eigenvector
-
Every list of eigenvectors corresponding to distinct eigenvalues of is linearly independent
-
For a finite-dimensional vector space , each operator on has at most dim(V) distinct eigenvalues